
Research
Overview
Research in the Dynamics Lab is broadly focused on the modeling and analysis of systems of a dominantly mechanical character, specifically the dynamics of constrained rigid bodies and nonlinearly elastic rods. Our work spans the gamut from theoretical foundations to technological applications and utilizes analytical, computational, and experimental tools.
Selected Current Research
Shoelaces

Almost everyone has experienced the frustration of having shoelaces that just won’t stay tied. Interestingly, from a scientific point of view, little is known about the physical mechanisms that allow simple walking to untie a shoelace knot. We investigated the dynamics behind this everyday phenomena in our 2017 paper, “The Roles of Impact and Inertia in the Failure of a Shoelace Knot,” which appeared in the Proceedings of the Royal Society A. With the help of a high-speed video camera and a series of experiments, we showed that the failure can be attributed to the combined effects of repeated impact of the shoe with the ground and inertial effects caused by the motion of the shoelaces.
Our work on shoelaces received a great deal of media coverage, including an excellent piece by ABC 7’s Wayne Freedman.
Mechanics of Marine Technologies
Many marine technologies have interesting nonlinear dynamics and fluid-structure interaction. The research we have conducted in this area includes oar blade design optimization and the modeling of an ocean wave energy converter (WEC) whose mass is modulated by the incident waves.
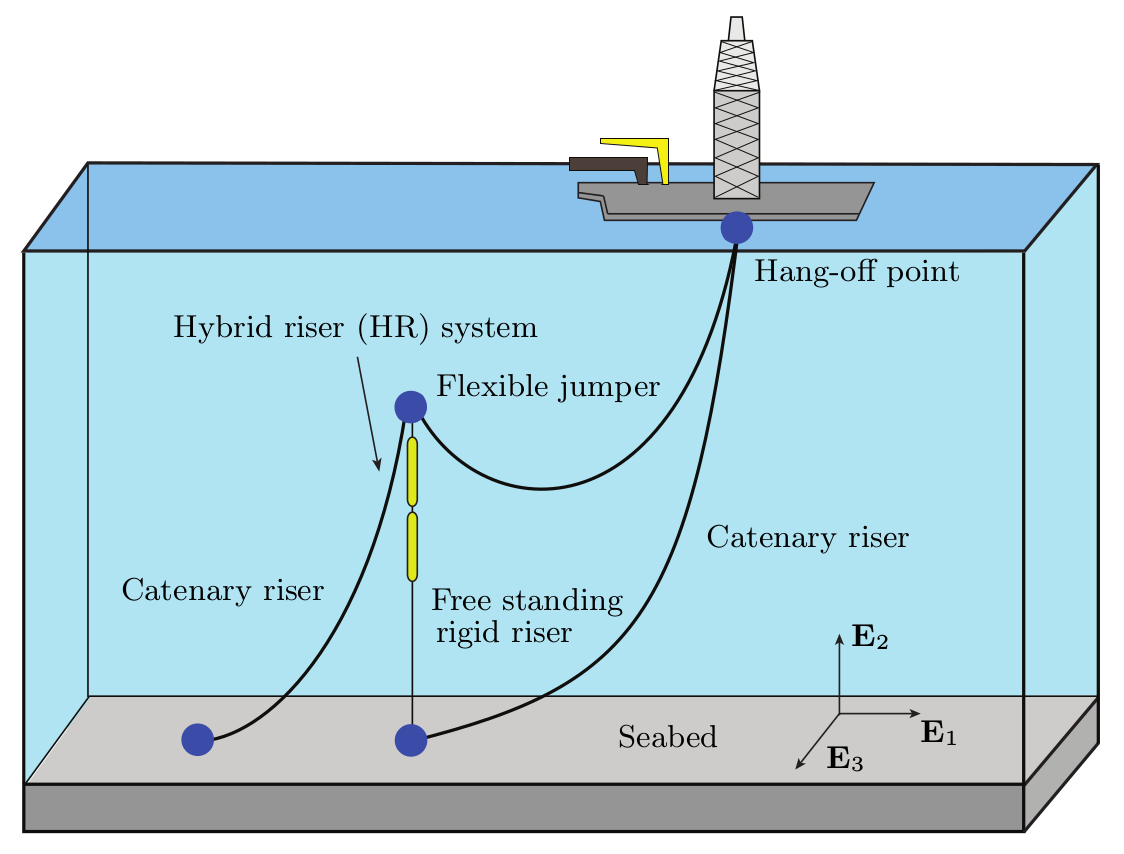
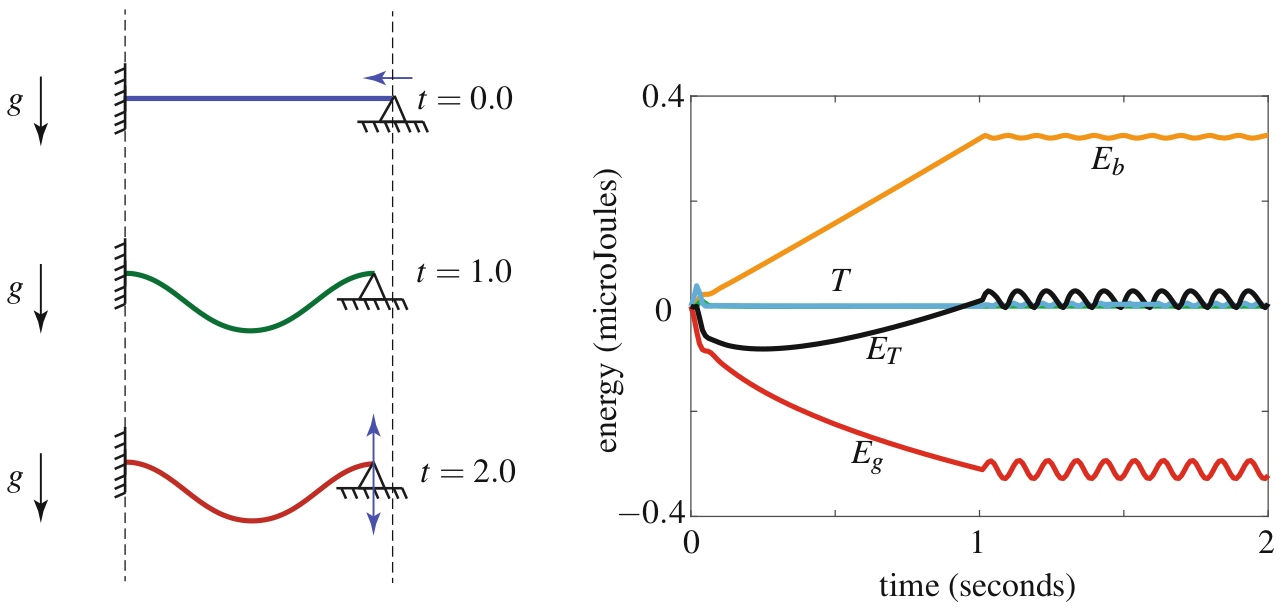
Our most recent research on this topic was focused on the dynamics of flexible risers. These massive structures are used to transport fluids to and from well heads on the ocean floor. Of particular interest was the mechanism by which these structures can become unstable.
Discrete Elastic Rods
Problems in rod mechanics are often difficult to solve numerically due to strong nonlinearities. By conceptually discretizing a rod into a series of masses, links, springs, and dampers, we are able to simulate a wide range of problems quickly and accurately. Recent research in this area has focused on the kinematics of discrete elastic rods and resulted in the publication of a book.
Fundamental Issues in Theories of Rods
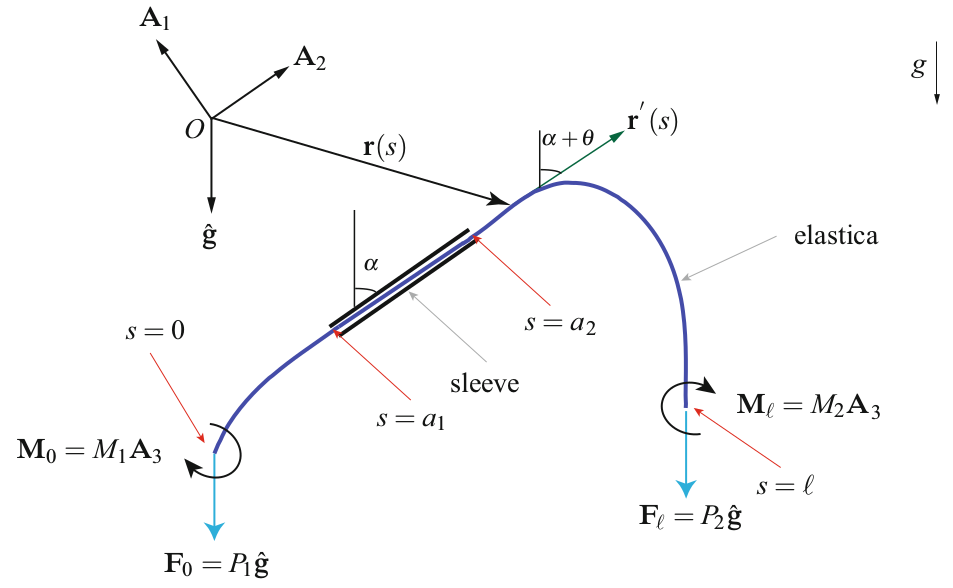
While rod theories have been in existence since the time of Euler’s elegant work on the elastica in the 18th century, work on formulating more sophisticated rod theories continues to this day. Much of this work is driven by applications and features nonlinear theories. For example, recent research on rods with helical substructures and/or electrostatic effects have been motivated by the flurry of interesting experiments on DNA molecules. Another set of biology-inspired developments have arisen from the need to formulate models for growing plant stems and their time varying material properties.
Mechanics of Soft Robots
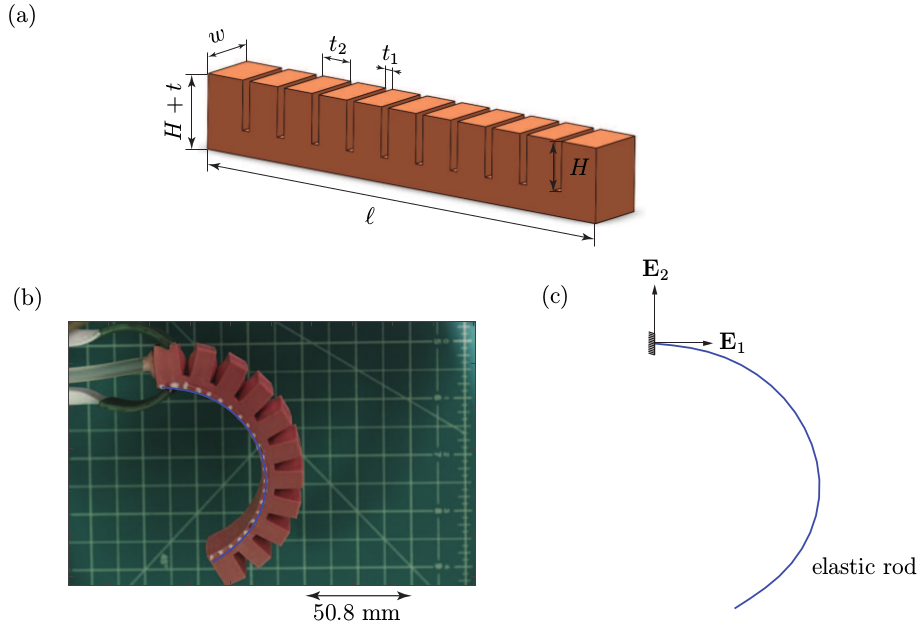
Soft robots are a nascent technology which display great promise in a wide variety of applications. Their design, however, is most often based on trial-and-error. One factor that prevents roboticists from using a more systematic design procedure is the lack of practically useful, accurate models. Recent work in this area has focused on the development of constitutive laws for soft robot limbs.